Merih - II
Mechanical Specialities
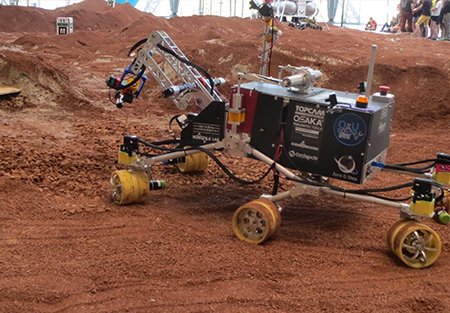
For locomotion, Merih-II has 6 specially designed wheels and an electrical motor is added to each wheel for a powerful drive. Steering of the robot is obtained by the motion of front and rear wheels. The Rocker-Bogie Mechanism that ensures at least 4 wheels touch the ground form the suspension system of Merih-II together with the differential mechanism that keeps the balance of Rocker-Bogie. Merih-II also has an arm that has 4 degrees of freedom to manipulate objects around itself. This arm also has a multifunctional gripper to help astronauts with taking various tool or soil/rock samples from the ground, turning switches on and off etc.
Electronics and Software Aspect
Electronic system of Merih-II can be divided into two main categories: Communication and Control. Control system of Merih-II depends on ROS (Robot Operating System). The codes that provide the robot to work are written in Python and C. The communication depends on a Raspberry Pi 3 that is on rover and a Linux driven PC that is on command table. The purpose of communication unit is to make sure there is a data exchange between the rover and base station. Robot and station are connected to each other with modems that have the frequency of 2.4 GHz and the power of 20 dBmW. As CPU of Merih-II, a Raspberry Pi 3 is used. The controls signals are taken by the CPU and transferred to MCUs for processing. Through the communication, 4 IP cameras can broadcast that are placed on rover to see terrain around.