Merih - I
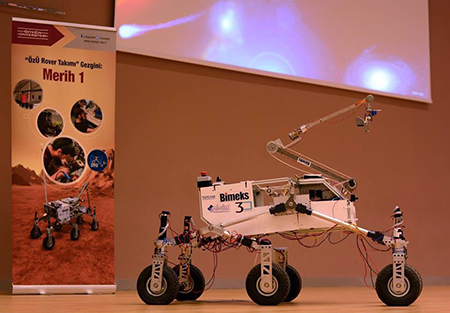
Merih-I, as first planetary rover of Turkey, has a suspension system called Rocker-Bogie which consists of six wheels and its differential. The arm of Merih-I has five degrees of freedom and mechanism which can be used as holder or shovel due to its assignment. The control system of Merih-I is built on one Model B and two Arduino Mega 2560. The software of the robot is controlled by using Robot Operating System (ROS). The actions of robot are handled with Arduinos which collects commands from the computer in control point through ROS. The connection between robot and the control computer is procured with a wireless network reaching up to 5 km.