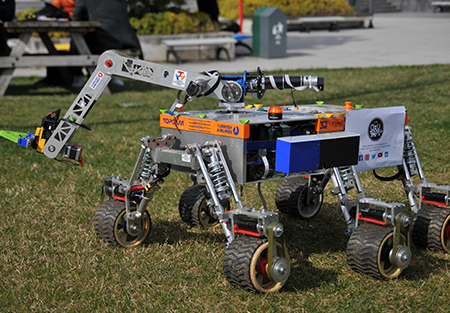
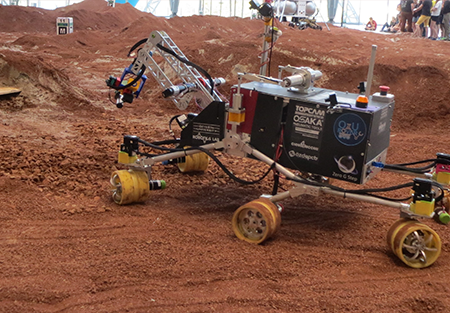
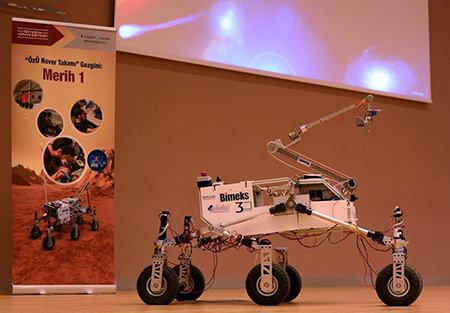
Theia-I, developed by the OzU Rover Team, is equipped with 6 independent bicycle-style wheels and a 1:2 pulley ratio for increased torque on rough terrain. It features a 5-DoF robotic arm with interchangeable end-effectors, including grippers and a shovel, and a drill for deep soil sampling. Weighing around 50 kg, Theia-I is controlled using Python, C++, and Arduino. A Jetson TX2 running Ubuntu communicates with a custom PCB motherboard via UART, coordinating motor drivers through an Arduino Mega using PWM signals.